Hi, I'm Haiyang Yu.
A
A passionate student with a curious mind and a solid academic background who enjoys solving complex and challenging real-world problems.
About
I am a Electrical and Computer Engineering Graduate Student at Cornell University. I enjoy problem-solving and coding. Always curious about cutting-edge technology. I have worked on programming languages like Python, C++, Matlab and various of scientific computing softwares. I am passionate about learning new skills and solving real-world problems.
- Programming Languages: Python, C, C++, Lingo, Mathematica
- Simulation: Matlab/Simulink, Carsim
- Mechanical Design: AutoCAD, Solidworks
Looking for an opportunity to work in a challenging position combining my skills in Software Engineering, which provides professional development, interesting experiences and personal growth.
Education
Ithaca, USA
Degree: Master of Engineering in Electrical and Computer Engineering
GPA: 3.62/4.0
- Embed Operating System
- Robot Perception
- Network Systems and Games
Courseworks:
Harbin Institute of Technology
Harbin, China
Degree: Bachelor of Engineering in Automation
GPA: 88.8/100
- Introduction to Intelligent Control
- Fundamental of Robotics
- Introduction to System Engineering
- Innovation training course: static optimization method
Relevant Courseworks:
University of California, San Diego
La Jolla, USA
Exchange Student
GPA: 3.9/4.0
- Linear Systems Fundamentals
- Introduction to Digital Design
- Introduction to Autonomous Vehicles
Courseworks:
Research


- Designed a trajectory planner based on ameliorated Theta* algorithm to conduct autonomous vehicles in a dynamic uncertain environment and avoid collisions with unpredictable moving obstacles.
- Generated an adaptive-MPC based control system for trajectory tracking and simulated in complex scenarios by Simulink/Carsim co-simulation.
- The paper of this project is still in progress.
- Tools: Matlab, Simulink, Carsim

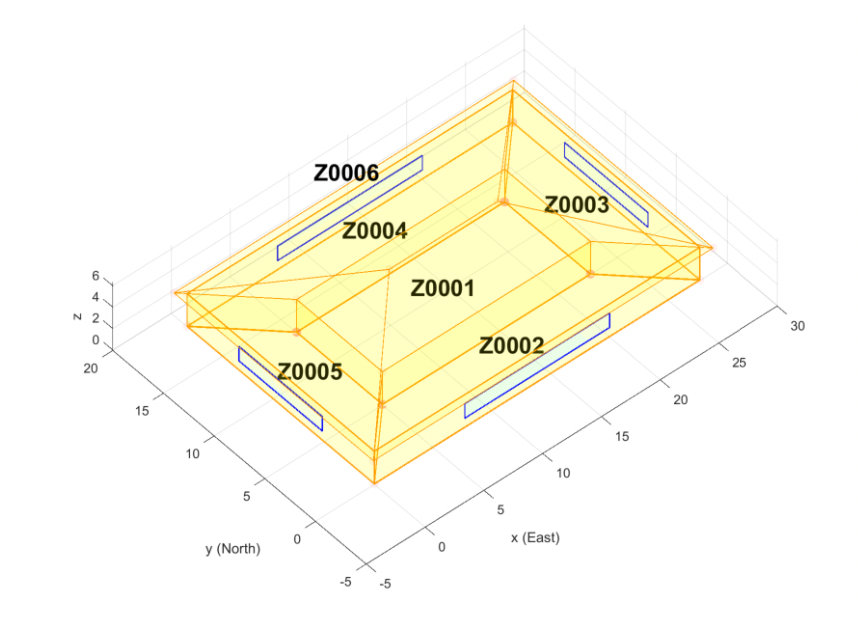
- Design building resistance-capacitance model in BRCM toolbox based on government dataset. Design system model for demand response control. A detailed model for result verification and a simplified model for model based control will be created.
- Develop a special RNN deep learning model as a predictive building model which contains multi-energy sources.
- Implement and train the DRL models with popular frameworks like Tensorflow and PyTorch, improve the model by reducing the time used in training and increasing the accuracy. Lighten the model so that it can be run on a system that has limited computing resources.
- Tools: Matlab, Python, Energy Plus, Open Studio
Projects
Path planning and tracking control for a pan-tilt camera.
A small autonomous car performed on simulated tracks
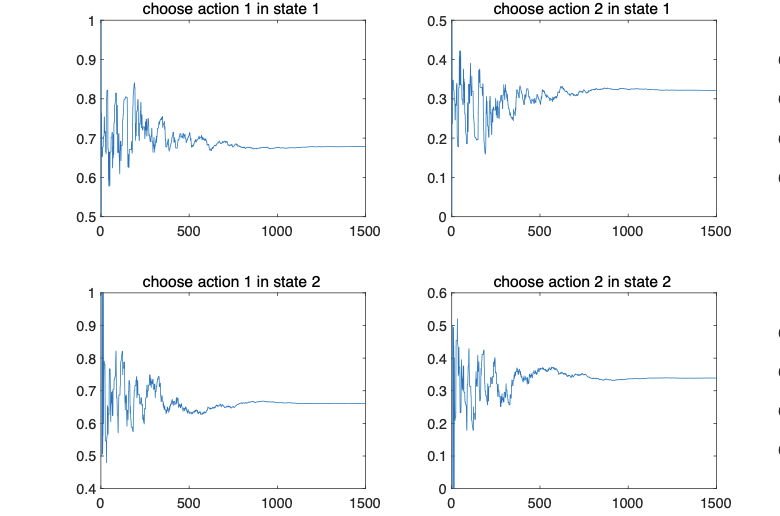
Multi-Agent Reinforcement Learning and Zero-Sum Stochastic Game
- Investigated value function approximation in the context of two players zero-sum Markov games.
- Reviewed the minimax value iteration and the minimax Q-learning algorithms.
- Simulated the minimax value iteration and the minimax Q-learning algorithms by a simple game and a real stochastic game.
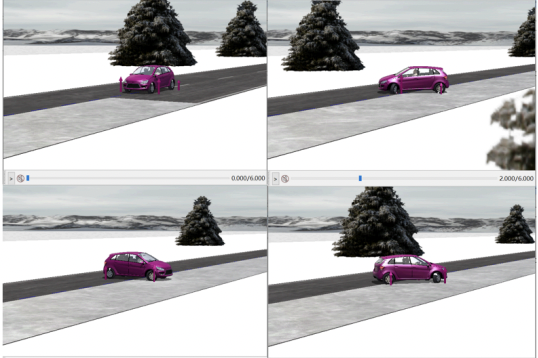
Research on Simple Automobile Anti-locking System Based on Carsim-Simulink
- The simple ABS control model is applied on the basis of Carsim's own B-class vehicle by Carsim-Simulink joint simulation.
- The output and simulation results are obtained by setting different slip ratio thresholds.
- Through different results, the trend of vehicle stability under different thresholds is studied, and the general law of ABS control is summarized.
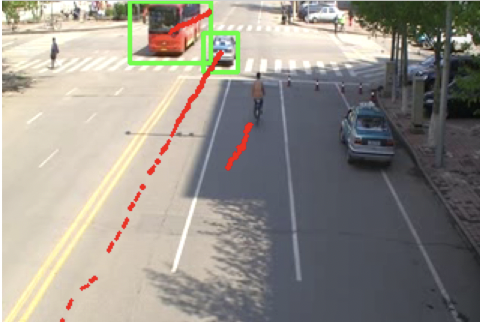
Tracking moving in streamvideo target based on OpenCV.
- Implemented backgroung segmentation based on k-nearest neighbors algrithm.
- Implemented tracking algrithm based on Kernelized Correlation Filters.
 Honorable Mention
Honorable Mention
 First Prize in CUMCM (Heilongjiang)
First Prize in CUMCM (Heilongjiang)